KISS Robotics
KISS Robotics
We specialize in developing and integrating robust robotic systems that
solve complex automation challenges. Whether you need to enhance
precision, improve system safety, or accelerate your development timeline,
our expertise in advanced robotics control and simulation provides a clear
path to success.
Please see our Testimonials page for
projects we successfully completed in the past.
System integration
Especially in automation, there are always several subsystems which
need to work together seamlessly to achieve a common goal.
Good system integration is therefore essential for every successful project.
- Definition of component performance requirements and sourcing,
supplier Due Diligence:
Accelerate development and avoid costly mistakes
- Automated testing including Hardware-in-the-Loop: Speed up
testing by reducing manual steps
- Certification e.g. according to ISO-10218: Ensure that your
robot meets your customers' requirements
- Real-time buses including EtherCAT, CAN-Bus, UDP: Select
the right technology for your application
- Enforcement of hard realtime constraints on bare metal and embedded
Linux including Yocto, RedHat and Ubuntu: Avoid glitches and
enable safe and smooth operation
- Clean and safe APIs for humand and machine interaction:
Make it dead easy for your customers to use your product
and hence increase market traction
- IMUs and force/torque sensors: Enhance the awareness of your
robot of the physical world around it
Algorithms
Our advanced algorithms ensure your robotic systems operate with maximum
efficiency and safety. We move beyond basic programming to deliver
real customer value.
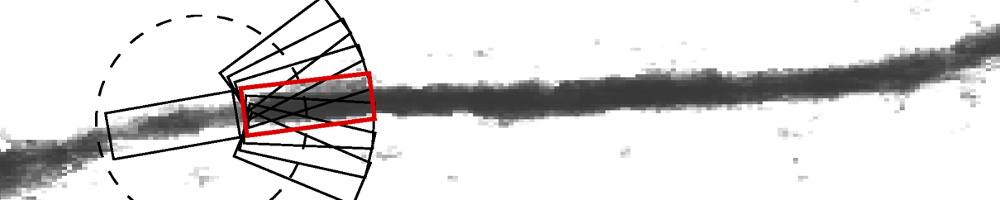
- Detection of self intersections and workspace violations:
For utmost operational safety and meeting ISO requirements
- Individual manipulator calibration: To enable sub-millimeter
absolute precision for highest production quality
- Modeling and simulation of robots and controllers:
To accelerate AI training, reduce physical prototyping cost and
shorten test cycles
- Automatic parameter identification: Accelerate
determination of essential robot parameters and make
the process more deterministic.
To achieve the above, we are experts in:
- Optimal Control
- Motion Planning (including AI integration)
- Obstacle avoidance
- Forward and Inverse Kinematics
- Jacobians and their applications
- Fast and accurate matrix and vector transforms
Controller tuning
For cobots and industrial robots, we do:
- Advanced full-body control: Enables the manipulator to achieve
complex tasks like cutting, welding etc.
- PID controllers with smart feedforward for high precision and minimal control
effort: Recude parasitic heat, energy consumption, and enable smooth
movement
- Monitoring of safe position and velocity limits, workspaces,
self intersections and foreign objects: Avoid
collisions and accidents and make the robot safe to use even with humans around
it
- Gravity and friction compensation: Improve control response
and reduce energy consumption
- Force control for industrial applications and combined control:
Enable jobs that
require precisely defined forces, like polishing